
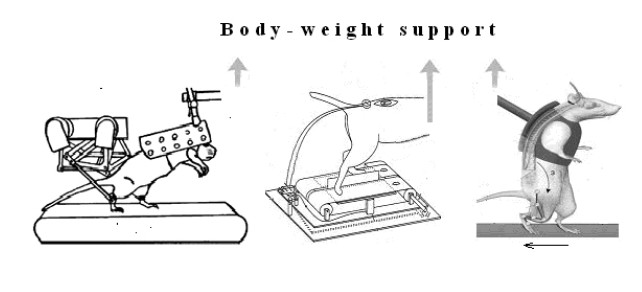
Метод диагностики и реабилитации децеребрированных животныхУДК 619: 616-089 Альбертин С. В. Федеральное государственное бюджетное учреждение науки «Институт физиологии Актуальной проблемой неврологии является разработ- ка эффективных технологий и устройств, адаптирован-ных для хирургического лечения и реабилитации двигательных функций у животных при тяжелых травмах позвоночника, сопровождаемых повреждениями спинного мозга [2, 3, 13, 22], а также для восстановления нарушенных функций опорно-двигательного аппарата, наблюдаемых после кровоизлияния в различные области головного мозга [16]. Хирургическая операция по декомпрессии спинного мозга и стабилизации позвоночного столба у животных всегда сочетается с интенсивной послеоперационной терапией, направленной на восстановление нервной проводимости спинного мозга и улучшения трофических свойств нервной системы. Проведение регулярных лечебных сеансов с помощью мишень-ориентированной электростимуляции проводящих путей спинного мозга [6, 15] и внутриспинальной трансплантации стволовых нервных клеток [7, 10] предполагает реабилитацию путем проведения послеоперационных физиотерапевтических процедур и локомоторного тренинга с помощью тредбана [2, 14, 21]. Известен способ локомоторного тренинга, в соответствии с которым лабораторное животное (кошка) размещают на наклоняемой опоре, снабженной датчиками давления, подвешивают переднюю часть тела животного на гамак, а заднюю -оставляют свободной, так, чтобы задние конечности опирались на 2-ленточный тредбан, выполненный наклоняемым [4, 14]. Однако применение данного способа не позволяет количественно оценивать спонтанную и принудительную двигательную нагрузку на задние конечности и нагружать передние конечности животного. Сходный способ реабилитации двигательной функции путем бипедального тренинга с облегчением веса животных используется в опытах на крысах [11, 19], в которых равновесие испытуемых и регулирование давления задних конечностей на опору тредбана осуществлялось подвешиванием животных, одетых в жилет со штоком, фиксируемым экспериментатором, или робото-техническим устройством (рисунок 1).
Рис. 1. Способ бипедального двигательного тренинга с облегчением веса у крыс [11, 19] и кошки - средний рисунок [4] При реабилитации произвольной двигательной активности у децеребрированных животных важно учитывать роль статических и статокинетических рефлексов. У животных с травмами спинного мозга большое значение имеет сохранность врожденных поз-ных и выпрямительных рефлексов, необходимых для осуществления целенаправленных движений. В ответ на определенные стимулы эти рефлексы позволяют перераспределять мышечный тонус (рефлексы сохранения позы) или нормализовать положение тела (выпрямительные рефлексы). Статические рефлексы наблюдаются в состоянии покоя, обеспечивая удерживание частей тела (например, головы) на месте, а стато-кинетические связаны с изменениями положения в пространстве, корректируя ориентацию конечностей при смене его положения. В позных рефлексах участвуют преимущественно мышцы туловища и проксимальные отделы конечностей. Поступающие к ним сигналы возникают в афферентах шейных мышц и лабиринта вестибулярного аппарата, являясь, вместе с кожными и зрительными афферентами, сигналами для инициации процесса рефлекторной коррекции позы и ориентации в пространстве. Способ локомоторного тренинга [4, 11, 19] путем бипедального тренинга с облегчением веса животных (рисунок 1) фактически направлен не на восстановление генетически врожденных координированных движений туловища, передних и задних конечностей, используемых животными до травмы при передвижении в естественных условиях, а на выработку нового способа передвижения на задних конечностях, сопровождаемого попыткой формирования новой позы с не естественной для животного двигательной координацией мышц туловища и задних конечностей. Конфликт между врожденной и вновь вырабатываемой двигательной координацией у этих животных сопровождается попыткой перестройки нейрональной организации структур мозга на новые условия передвижения, что препятствует восстановлению двигательных функций. Способ тренинга животного, с опорой задними конечностями на тредбан при облегчении его веса (снижения давления задних конечностей на опору на 8090%) сопровождается вынужденной перестройкой позы, и, как следствие, увеличением вероятности ноцицептивной (болевой) афферентации, которая, согласно сообщению ряда ученых [18, 23], оказывает выраженное тормозное влияние на пластичность нейрональной сети спинного мозга, участвующей в процессе реабилитации двигательных функций. Возможность возвращения животных, реабилитированных вышеуказанным способом, к нормальным условиям передвижения, связанным с использованием прежнего, врожденного способа выполнения координированного движения туловища, передних и задних конечностей, является проблематичной. Об этом свидетельствуют опыты, проведенные на крысах, задняя часть тела которых, для облегчения веса тела, подвешивалась с возможностью передвижения животного с помощью передних конечностей [8, 9]. Возвращение этих животных после 7-14 дней указанной тренировки на естественный способ передвижения с участием всех конечностей выявил значительные нарушения в поддержании нормальной позы и двигательной координации при попытках передвижения на тредбане, а также сопровождались морфологическими изменениями костно-мышечной системы животного [20]. Особенно выраженные нарушения двигательной координации у этих животных наблюдались при попытках выполнить передвижение по лестнице, нормальное осуществление которого связано с необходимостью вовлечения активности моторной коры мозга в осуществление этого более сложного координированного движения, в отличие от выполнения шагательных движений на тредбане - автоматизированной формы движения, детерменированной, в основном, нейронной сетью спинного мозга [9]. Известно, что участие коры и супраспинальных структур головного мозга в восстановлении двигательных функций зависит от изменения позы, кинематики движения и поведенческого контекста тестируемого движения, требующих мышечной синергии различных частей тела, связанных с изменениями позы, ориентации в пространстве и целенаправленной координированной двигательной активности [17]. Активность нейронов моторной коры и супраспинальных структур мозга в этом случае синхронизирована с пространственно-временной активацией мотонейронов, иннервирующих конечности животного. Опыты, проведенные на животных [5, 12], показали важную роль супраспинальых текто- и ретикуло-спинальных путей, оставшихся интактными после перерезки кортико-спинальных и рубро-спинальных проводящих путей мозга, в восстановлении нормальной позы и выполнении различных пищедобывательных движений, выполняемых передними конечностями, в результате осуществления двигательной тренировки, требующей позной перестройки мышечной активности рабочей и опорной конечностей животного. Отсюда возникает необходимость использования различных поведенчески мотивированных процедур для вовлечения коры и супраспинальных структур мозга, включающих текто-спинальные и ретикуло-спи-нальные пути, при разработке устройств для восстановления двигательных функций децеребрированных животных. Ближайшим аналогом к предлагаемому нами устройству является устройство, в состав которого входит: опорная рама, держатель головы с гибким элементом подвеса, лоток для под-дер-жания туловища животного, при этом гибкий элемент подвеса выполнен в виде эластичной трубки, заполненной токопроводящим материалом, изменяющим при механических нагрузках электрическое сопротивление [1]. Устройство позволяет минимизировать стресс, вызванный иммобилизацией подопытного животного, а также осуществлять непрерывную регистрацию фазических движений головы, туловища и тонического напряжения шейных мышц. Однако, данное устройство было предназначено для решения ограниченной задачи, связанной с тестированием зрительной функции животного, и не дает возможности изменять исходную позу для выполнения движений, не позволяет осуществлять двигательную нагрузку на передние и задние конечности животного для проведения локомоторного тренинга, исключает возможность последовательно тестировать процесс восстановления двигательной функции лабораторного животного, оценивать функциональное состояние животного, включая влияние возможных болевых реакций при осуществлении двигательных реакций, а также не дает возможности мотивировать животное на выполнение произвольных движений. Проблема вышеуказанного способа реабилитации - наличие конфликта между врожденной и вновь вырабатываемой двигательной координации у децеребрированных животных сопровождаемой попыткой перестройки нейрональной организации структур мозга на новые условия передвижения, а также отсутствие возможности двигательного тренинга путем осуществления мотивированных целенаправленных движений глаз, головы и конечностей животного с регистрацией функционального состояния животного и возможных болевых реакций при выполнении движений, что затрудняет восстановление нормальных двигательных функций у децеребрированных животных. Вышеуказанные способы реабилитации децеребрированных животных имеет следующие ограничения: 1. Способ не позволяет подопытным животным восстанавливать генетически врожденные позные рефлексы и координированные движения туловища, передних и задних конечностей, применяемые животными при передвижении до травмы спинного мозга. 2. Способ не позволяет проводить сенсомоторное тестирование и локомоторный тренинг при нахождении туловища животного в естественных для него позах («лежа», «сидя», «стоя»). 3. Способ не позволяет проводить локомоторный тренинг без не естественной для животного разгрузки его веса, осуществляемого с помощью экспериментатора. 4. Способ не позволяет тестировать сохранность оптокинетических реакций и координированных движений головы и глаз, необходимых для осуществления животным позных рефлексов и целенаправленных двигательных реакций. 5. Способ не позволяет во время локомоторного тренинга дозированно нагружать передние и задние конечности подопытного животного. 6. Способ не позволяет проводить тестирование и тренинг животного, сидящего в высокой стойке с опорой на передние конечности, для выполнения двигательных реакций передними конечностями, требующих перераспределения мышечной нагрузки на мышцы туловища, опорной и рабочей конечностей животного. 7. Способ не позволяет проводить диагностику нарушений двигательной функции и сопутствующих сенсомоторных расстройств у животных с повреждениями в разных отделах спинного мозга, требующих фиксации головы и туловища животного в различных положениях. 8. Способ не позволяет при тренинге мотивировать активность животных для выполнения тестируемых двигательных реакций. 9. Способ не обеспечивает контроль тонического напряжения мышц при попытках выполнения подопытным животным движений в ходе эксперимента. 10. Способ не позволяет контролировать у животных состояние дискомфорта и наличие болевых реакций при тестировании и проведении локомоторного тренинга. Цель предлагаемой разработки - создание оптимальных условий для реабилитации децеребрированных животных путем последовательного восстановления врожденных координированных движений головы, туловища, передних и задних конечностей, осуществляемых при изменении позы децеребрированного животного. Результаты исследований и их обсуждение. Для разрешения указанной проблемы предлагается способ реабилитации децеребрированных животных, предполагающий восстановление врожденной двигательной координации мышц, причем восстановление осуществляют последовательно, в четырех исходных положениях (позах) животного, а именно, в первом положении лежа на лотке, во втором положении сидя на опорном основании в высокой стойке с опорой на передние конечности, в третьем положении лежа на лотке с вырезами для передних и задних конечностей, с возможностью количественной нагрузки на передние и задние конечности, в четвертом положении стоя на тредбане с опорой на передние и задние конечности. В первом положении у животного тестируют сохранность оптокинетического и зрачкового рефлексов, выполнение ориентировочных движений головы и глаз на сенсорные раздражители с регистрацией фазических движений головы, туловища и тонического напряжения шейных мышц, у животного тестируют сохранность саккадических и следящих движений головы и глаз при движении зрительных раздражителей на экране монитора с различной скоростью. При выявлении нарушений указанных двигательных реакций проводят тренировку выполнения ориентировочных движений головы и глаз на предъявление пространственно разнесенных звуковых и зрительных раздражителей для их коррекции. Во втором положении тестируют и тренируют способность животного к осуществлению двигательных реакций, выполняемых передними конечностями на тактильные раздражения, а также к выработке условных двигательных рефлексов путем выжима рычага манипулятора на предъявление сенсорных сигналов различной модальности, сопровождаемых вознаграждением при адекватном выполнении двигательных реакции, при этом осуществляют непрерывный мониторинг функционального состояния и параметров двигательных реакций, включая величину нагрузки, наличие попыток выполнения двигательного ответа, латентный период, силу нажатия на рычаг, продолжительность, характер и динамику двигательной реакций, осуществляемой животным при выжимах рычага манипулятора, а также регистрируют зрачковые реакции, как показатель наличия возможных болевых реакций при изменении позы и выполнении движений, требующих перераспределения нагрузки на мышцы туловища, опорной и рабочей конечностей животного. В третьем положении лежа на лотке с вырезами для передних и задних конечностей, с возможностью количественной нагрузки на передние и задние конечности. У животного тестируют двигательные реакции животного на тактильные раздражения кожи передних и задних конечностей. После этого приступают к тестированию способности к самостоятельному сохранению позы, в положении стоя на опорном основании, при изолированном поднятии одной конечности, а также выполнению мотивированной двигательной реакции передними лапами при вознаграждении животного пищей. Мышечную нагрузку на конечности животного при осуществлении координированных движений постепенно увеличивают передвижением опорного основания вверх путем вращения опорных гаек по резьбовой поверхности опорных стоек устройства. При сохранении животным устойчивой позы в положении стоя с опорой на все конечности, на опорное основание устанавливают тредбан для последующей локомоторной тренировки животного. Во время тестированиия и локомоторного тренинга контролируют функциональное состояние животного. В четвертом положении ограничение подвижности головы ослабляют, что обеспечивает более тесный эмоциональный контакт экспериментатора с животным, включая кормление из рук. У животного, стоящего на опорном основании, тестируют двигательные реакции на тактильные раздражения кожи туловища и конечностей и выполнение постуральных и ориентировочных ответов в виде движения глаз, поворота головы и туловища в сторону предъявляемого сенсорного сигнала. Затем проводят тренинг с целью восстановления врожденных пищедобывательных движений, выполняемых передними конечностями при извлечении животным из узкого тубуса пищи (например, кусочки мяса), подаваемых экспериментатором. Локомоторный тренинг осуществляют с помощью тредбана, выполненного с возможностью изменения скорости, направления движения и угла наклона рабочей ленты тредбана, который устанавливают на опорное основание. Инициирование животных к самостоятельному передвижению проводят без использования тредбана, отодвигая подвижные несущие каретки с закрепленным сборным стержнем-фиксатором головы назад от источника вознаграждения. В четвертом положении также возможно проведение тренинга двигательной координации мышц туловища и передних конечностей путем последовательного осуществления инструментальной реакции выжима передней конечностью рычага манипулятора, сменяемой извлечением этой конечностью подаваемого в тубусе вознаграждения. Изменение исходного положения животного обеспечивают путем установки/снятия съемных опорного основания и лотка устройства для последовательного размещения животного в вышеуказанных положениях. На всех этапах тестирования и локомоторного тренинга голову животного мягко фиксируют с помощью гибких элементов подвеса с возможностью ограниченных движений головы, при этом регистрируют двигательные реакции и тоническое напряжение мышц животного и вегетативные реакции, которые сигнализируют о наличии возможного дискомфорта и болевых реакций. Мышечную нагрузку при осуществлении координированных движений увеличивают постепенно, и по параметрам регистрируемых ответов оценивают сохранность исследуемых позных рефлексов, процесс восстановления координированных двигательных реакций и способность животных к передвижению, и по этим показателям определяют оперативные тактики и физиотерапевтические процедуры, необходимые для дальнейшей коррекции двигательных функций животного. В перерывах между сеансами реабилитации голову освобождают от фиксации, и животное размещают в мягком контейнере для проведения физиотерапевтической процедуры массажа мышц туловища и конечностей животного. Описание устройства для осуществления предложенного способа реабилитации децеребрированого животного. Для реабилитации децеребрированных животных предлагается предложенное нами устройство [1], содержащее опорную раму, лоток для размещения туловища животного, опорные стойки, направляющие, закрепленные на лотке, несущие каретки, выполненные с возможностью перемещения по направляющим, и оснащенный втулкой подвеса головы сборный стержень-фиксатор. Концы сборного стержня-фиксатора закреплены в каретках, его центральная часть выполнена упругой, концевые части и концевые втулки с цанговыми зажимами, установленные с возможностью осевого перемещения, и переходные хомутики. Центральная часть сборного стержня-фиксатора выполнена в виде эластичной трубки, заполненной токороводящим материалом, изменяющим электрическое сопротивление на внешние механические воздействия и включенным в электрическую схему, последовательно соединенную с усилителем, регистрирующим прибором и монитором. Концевые части сборного стержня-фиксатора снабжены сквозными осевыми проточками, а прижим центральной части стержня к его концевым частям осуществляется с помощью погружных винтов, при этом сборный стержень-фиксатор выполнены с возможностью жесткого сочленения его составных несущих элементов. При модификации устройства лоток для размещения туловища животного выполнен съемным, его концевые части содержат вырезы для выведения передних и задних конечностей животного наружу. Устройство оснащено съемным опорным основанием, выполненным с возможностью передвижения по опорным стойкам путем вращения опорных гаек по резьбе, нанесенной на стойки устройства. Устройство содержит электроды, вживляемые в мышцы-антагонисты конечностей животного с подкожным выводом их проводников на электрический разъем, закрепляемый на голове животного. Устройство содержит манипулятор, выполненный в виде рычага для осуществления животным условнорефлекторных реакций выжима рычага передними конечностями. Манипулятор закреплен на оси электрического потенциометра, включенным в электрическую схему устройства, выполнен с возможностью регуляции нагрузки на рабочую лапу животного и регистрации мышечного усилия при его выжиме с помощью тензодатчика, установленного на рабочей площадке рычага. Устройство содержит пупилометр для регистрации зрачковых и глазодвигательных рефлексов в отраженном инфракрасном свете, причем пупилометр закреплен на переходном хомутике, расположенном на центральном стержне сборного стержня-фиксатора. Устройство содержит диспенсор вознаграждения, подаваемой в виде жидкой пищи, причем проводник диспенсора выполнен с возможностью крепления на центральной пластине лотка, или на переходном хомутике, расположенным на сборном стержне-фиксаторе. Устройство оснащено тубусом - узкой трубкой, выполненной из прозрачного материала (оргстекло), содержит подаваемые экспериментатором оформленные порции пищи (например, кусочки мяса) и предназначена для тренировки пищедобывательных движений, выполняемых передними конечностями животного, и тредбаном для локомоторного тренинга животного, выполненным с возможностью регулирования скорости и направления движения ленты тредбана и изменения угла его наклона (рисунок 2, 3, 4, 5, 6, 7, 8, 9, 10).
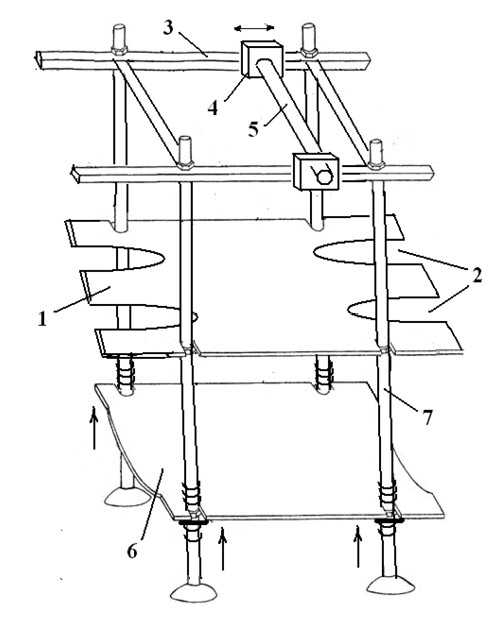
Рис. 2. Компоновка основных частей устройства: 1 - лоток для размещения туловища животного; 2 - вырезы полуовальной формы; 3 - направляющие; 4 - несущие каретки; 5 - сборный стержень-фиксатор (головодержатель); 6 - опорное основание; 7 - опорные стойки; стрелками отмечено направление движения опорного основания путем вращения ходовых гаек по резьбе опорных стоек для регулирования нагрузки на опорные конечности животного
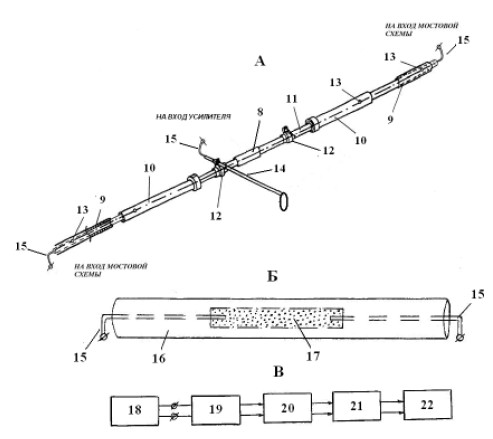
Рис. 3. Конструкция сборного стержня-фиксатора и блок-схема включения тензодатчика в электрическую схему устройства: 8 - втулка подвеса головы; 9 - концевая часть сборного стержня-фиксатора; 10 - концевая втулка с цанговым зажимом; 11 -центральная часть сборного стержня-фиксатора; 12 - переходные хомутики с поворотными фиксаторами; 13 - винты фиксации; 14 - пупилометр; 15 - отводящие проводники; 16 - корпус центральной части сборного стержня-фиксатора в виде эластичной трубки; 17 - полость трубки, заполненная токопроводящим материалом (например, угольный порошок); 18 - тензодатчик; 19 -мостовая схема; 20 - усилитель; 21 - регистрирующий прибор; 22 - монитор экспериментатора
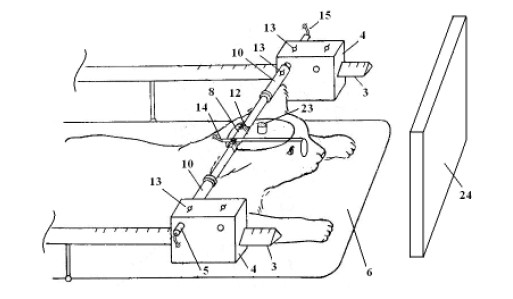
Рис. 4. Схема фиксации головы животного: 3 - направляющие; 4 - несущие каретки; 5 - сборный стержень-фиксатор; 6 - опорное основание; 8 - втулка подвеса головы; 10 - концевые втулки с цанговыми зажимами; 12 - переходные хомутики; 13 - винты фиксации; 14 - пупилометр с отводящим проводником; 15 - отводящие проводники сборного стержня фиксатора; 23 - электрический разъем для подключения вживленных мышечных электродов к усилителю и регистрирующему прибору; 24 - монитор
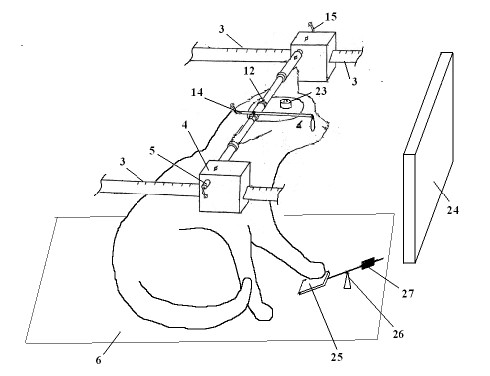
Рис. 5. Рабочая поза для тестирования и двигательного тренинга животного, сидящего в высокой стойке с опорой на передние конечности при осуществлении локальных инструментальных реакций: 3 - направляющие; 4 - несущие каретки; 5 - сборный стержень-фиксатор; 6 - опорное основание; 12 - переходные хомутики; 14 - пупилометр с отводящим проводником; 15 - отводящие проводники; 23 - электрический разъем для подключения вживленных мышечных электродов к усилителю и регистрирующему прибору; 24 - монитор; 25 - манипулятор (рычаг); 26 - ось электрического потенциометра; 27 - противовес с регулируемым грузом; диспенсор для подачи жидкой пищи закрепляют на переходном хомутике 12 сборного стержня-фиксатора (для упрощения рисунка не показан)
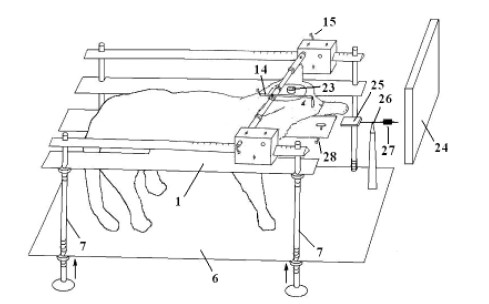
Рис. 6. Рабочая поза - животное лежит на лотке, снабженным вырезами для вывода конечностей животного наружу с возможностью создания и регулирования нагрузки на опорные конечности животного: 1 - лоток для размещения туловища животного; 6 -опорное основание; 7 - опорные стойки; 14 - пупилометр с отводящим проводником; 15 - отводящие проводники; 23 - электрический разъем для подключения вживленных мышечных электродов к усилителю и регистрирующему прибору; 24 - монитор; 25 - манипулятор (рычаг); 26 - ось электрического потенциометра; 27 -противовес с регулируемым грузом; 28 - диспенсор для подачи жидкой пищи; стрелки - направление движения опорного основания с помощью вращения ходовых гаек по резьбе опорных стоек для регулирования нагрузки на опорные конечности животного
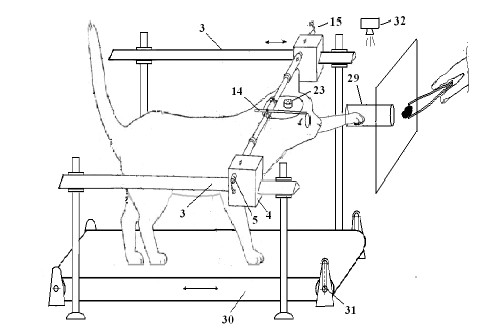
Рис. 7. Рабочая поза - стойка с опорой на все конечности: двигательные реакции и локомоторный тренинг подопытного животного на заключительном этапе реабилитации осуществляется с использованием тубуса для подачи пищи в оформленном виде и тредбана выполненного наклоняемым: 3 - направляющие; 5 - сборный стержень-фиксатор; 14 - пупилометр с отводящим проводником; 15 - отводящие проводники сборного стержня-фиксатора; 23 - электрический разъем для подключения вживленных мышечных электродов к усилителю и регистрирующему прибору; 29 - тубус для подачи пищи в оформленном виде; 30 - тредбан; 31 - регулятор наклона опорной ленты тредбана; 32 - видео-регистратор
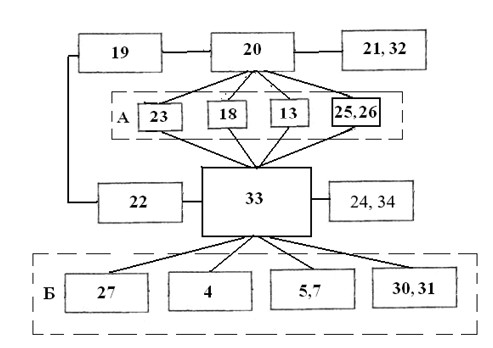
Рис. 8. Блок-схема приборов, функционально используемых в заявляемом устройстве. Испытуемый объект и стандартные приборы регистрации: 19 - мостовая схема; 20 - усилитель многоканальный; 21 - регистрирующий прибор; 22 - монитор экспериментатора; 24 - монитор для экспозиции тестируемых сигналов; 32 - видео-регистратор; 33 - животное, тестируемое при различных врожденных положениях (позах) тела; 34 - компьютер; (А) устройство регистрации: 25 - тензодатчик рычага манипулятора для регистрации фазических и тонических движений головы и туловища; 13 - пупилометр для регистрация зрачкового и глазодвигательного рефлексов; 18 - тензодатчик головодержателя для регистрации фазических и тонических движений головы и туловища; 23 - устройство для отведения и регистрации электромиограммы мышц шеи и конечностей; 25, 26 - маниулятор, оснащенный потенциометром для регистрации движений передних конечностей; (Б) устройство для регулирования нагрузки: 4 - головодержатель с регулируемой гибкостью рабочей части; 5, 7 - опорное основание с регулируемым положением на опорных стойках устройства; 27 - манипулятор с регулируемым грузом-противовесом; 30, 31 - тредбан с регулируемым наклоном, направлением и скоростью движения ленты
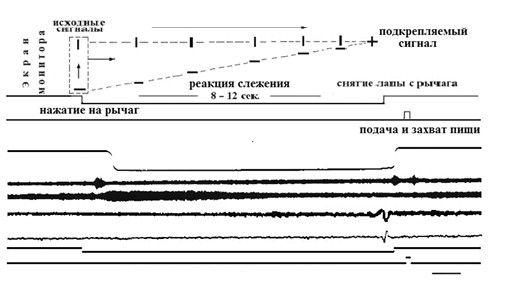
Рис. 9. Электрограммы осуществления животным двигательного пищевого рефлекса, выполняемого передней конечностью, связанного с ожиданием подкрепляемого пускового условного сигнала на экране монитора. Сверху вниз: механограмма (МХГ) движения рабочей лапы животного (выжима рычага манипулятора и его удержание в течение 8-12 секунд, необходимого для подачи пищи и ее захватом рабочей лапой); электромиограммы (ЭМГ) мышцы-сгибателя (m. biceps brachii) и мышцы-разгибателя (m. triceps brachii) рабочей лапы; ЭМГ шейных мышц; электро-окулограмма (ЭОГ); отметка включения сенсорных сигналов. Калибровка времени - 1 сек. Скорость движения на экране зрительных сигналов - 6°/сек.
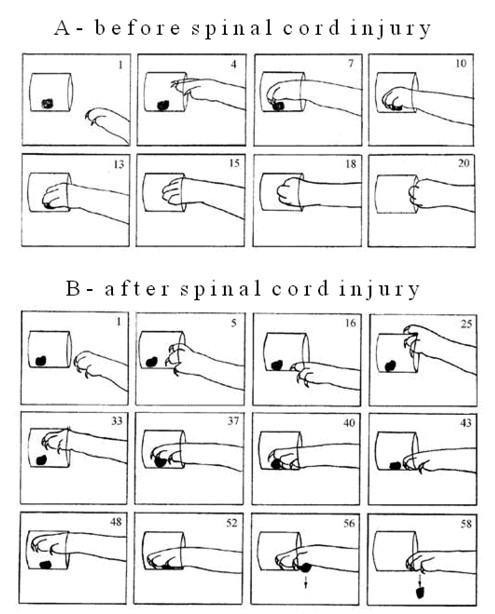
Рис. 10. Характерные нарушения двигательной реакции извлечения пищи из тубуса у животных с повреждением спинного мозга: А - пищедобывательные реакции до операции; Б - пище-добывательные реакции после операции ламинэктомии. Цифры - порядковые номера видеокадров регистрируемого пище-добывательного рефлекса. На рисунке Б: 5, 16, 25 - неточные попадания рабочей лапой в тубус; 37, 40, 43 - неадекватный захват и выгребание пищи из тубуса; 56, 58 - падение пищи в результате нарушения ее захвата Предлагаемое устройство содержит съемный лоток 1 с вырезами 2 для выведения передних и задних конечностей животного наружу, направляющие 3, несущие каретки 4, сборный стержень-фиксатор 5, съемное опорное основание 6, опорные стойки 7. Съемный лоток 1 предназначен для размещения туловища животного. Наиболее удобно, если вырезы 2 лотка имеют полуовальную форму. Несущие каретки 4 выполнены с возможностью перемещения по направляющим 3, закрепленным на лотке. Опорное основание 6 выполнено съемным, с возможностью перемещения по опорным стойкам 7. Концы сборного стержня-фиксатора закреплены в каретках 4, его центральная часть 11 выполнена в виде эластичной трубки. Средняя часть трубки заполнена токопроводящим материалом (например, угольным порошком) 17, изменяющим свое электрическое сопротивление в результате механических воздействий, служит тензодатчиком и находится в контакте с отводящими проводниками 15. Отводящие проводники 15 герметически закреплены в концевых отделах эластичного стержня. Свободные концы проводников выведены наружу и последовательно соединены с мостовой схемой 19, усилителем 20, регистрирующим прибором 21 и монитором экспериментатора 22. В состав сборного стержня-фиксатора также входят надвижные втулки 10 с цанговыми зажимами и концевые части 9 сборного стержня-фиксатора. Концевые части 9 снабжены сквозными осевыми проточками для вывода отводящих проводников 15 наружу и прижима центральной части стержня 11 к концевым частям 9 с помощью погружных винтов, расположенных в теле концевых частей 9 сборного стержня-фиксатора. Устройство содержит манипулятор 25 для осуществления животным двигательного условного рефлекса и пупилометр 14 для регистрации зрачковых рефлексов в инфракрасном свете. Пупилометр закреплен на переходном хомутике 12, расположенном на центральном стержне фиксатора 11. Манипулятор, выполненный в виде рычага, 25 установлен перед животным, или закрепляется на боковых пластинах передней части лотка. При этом манипулятор 25 расположен на оси электрического потенциометра 26 и оснащен регулятором двигательных нагрузок, выполненым в виде регулируемого груза-противовеса 27, а рабочая площадка рычага 25 оснащена пленочным тензодатчиком (не показан на чертеже) для регистрации мышечного усилия при выжиме рычага манипулятора. Тредбан 30 с регулятором 31 угла наклона устанавливают на опорное основание. Для вознаграждения животных при выполнении тестируемых двигательных реаций используют диспенсор для подачи жидкой пищи 28, или тубус для подачи пищи в формованном виде 29 Проводник диспенсора вознаграждения 28 закрепляют на центральной пластине лотка 1, или на хомутике сборного стержня фисатора 5. Видеорегистратор 32 для регистрации двигательной активности и поведенческих реакций животного может быть установлен перед животным, сбоку или сверху. Предлагаемые способ и устройство используют следующим образом. Подопытное животное с жестко закрепленной на черепе втулкой подвеса головы 8 помещают на лоток 1 устройства. Центральную часть 11 сборного стержня-фиксатора последовательно пропускают через втулку 8 подвеса головы, переходные хомутики 12, надвижные втулки 10 и концевые части 9 сборного стержня-фиксатора. Переходные хомутики 12 сочленяют с втулкой 8 подвеса головы и закрепляют на центральной части стержня 11 с помощью поджимных гаек, а прижим центральной части стержня 11 к концевым частям осуществляют с помощью погружных фиксирующих винтов 13. Концевые части 9 стержня устанавливают в сквозные отверстия несущих кареток 4, расположенных на направляющих 3, и фиксируют их положение винтами 13. Установка требуемой рабочей длины центральной части стержня осуществляется с помощью осевого перемещения надвижных конечных втулок 10, положение которых на концевых частях 9 сборного стержня-фиксатора 5 фиксируется винтами 13. Отводящие проводники 15 центральной части 11 сборного стержня-фиксатора 5 подключают к входным клеммам мостовой схемы 19, последовательно соединенной с усилителем 20, регистрирующим прибором 21 и монитором экспериментатора 22. Устройство обеспечивает возможность регулировать чувствительность регистрации двигательной активности животного путем исходного растягивания в продольном направлении центрального части 11 сборного стержня-фиксатора. Для тестирования животного и осуществления двигательного тренинга напротив его глаза устанавливают и включают датчик пупилометра 14, размещают монитор 24 для экспозиции тестируемых сенсорных сигналов, диспенсор для подачи жидкой пищи 28, или тубус для подачи пищи в формованном виде 29, видео-регистратор 32, манипулятор 25, оснащенный тензодатчиком, электрическим потенциометром 26 и регулируемым грузом-противовесом 27 для осуществления и регистрации двигательных реакций животного, или тредбан 30 для осуществления локомоторного тренинга. Тестирование и локомоторный тренинг проводят поэтапно, изменяя исходное положение (позу) животного в предлагаемом устройстве в следующей последовательности: 1. Исходное положение «лежа» (лоток снимают, туловище животного размещают на опорном основании. У децеребрированного животного тестируют сохранность оптокинетического и зрачкового рефлексов, выполнение ориентировочных движений головы и глаз на сенсорные раздражители с регистрацией фазических движений головы, туловища и тонического напряжения шейных мышц. Кроме того, у животного тестируют сохранность саккадческих и следящих движений глаз и движений головы при движении зрительных раздражителей на экране монитора с различной скоростью. При выявлении нарушений указанных двигательных реакций проводится тренировка выполнения ориентировочных движений головы и глаз на предъявление пространственно разнесенных звуковых и зрительных раздражителей путем повторного предъявления. 2. Исходное положение «сидя в высокой стойке с опорой на передние конечности». У животного тестируют и тренируют способность к осуществлению двигательных реакций, выполняемых передними конечностями, на тактильные раздражения, а также к выработке условных двигательных рефлексов путем выжима рычага манипулятора на предъявление сенсорных сигналов различной модальности, сопровождаемых вознаграждением жидкой пищей при адекватном выполнении двигательных реакции. У животного при этом осуществляют непрерывный мониторинг функционального состояния и параметров двигательных реакций: величину нагрузки, наличие попыток, латентный период, силу нажатия на рычаг, продолжительность, характер и динамику двигательной реакций, осуществляемой животным при выжимах рычага манипулятора. Силу нажатия на рычаг определяют с помощью тензодатчика. Тензодатчик может быть, например, пленочным, наклеенным на рычаг. У животного также регистрируют зрачковые реакции, как показатель наличия возможных болевых реакций, связанных с изменением позы и выполнением движений, требующих перераспределения мышечной нагрузки на мышцы туловища, опорной и рабочей конечностей животного. 3. Исходное положение «стоя на опорном основании с разгрузкой веса туловища, лежащего на лотке с вырезами для передних и задних конечностей». Эта позиция позволяет во время локомоторного тренинга количественно нагружать передние и задние конечности подопытного животного. У животного тестируют двигательные реакции на тактильные раздражения кожи передних и задних конечностей. После этого приступают к тестированию способности к самостоятельному сохранению позы в положении стоя с опорой на передние и задние конечности при изолированном поднятии одной конечности, а также выполнению мотивированной двигательной реакции передними лапами, подкрепляемой вознаграждением. Вознаграждение в виде жидкой пищи подают с помощью диспен-сора, соединенного с рычагом манипулятора. При выжиме рычага животное получает порцию жидкой пищи. Мышечную нагрузку на конечности животного при осуществлении координированных движений постепенно увеличивают передвижением опорного основания вверх путем вращения опорных гаек по резьбовой поверхности опорных стоек устройства. Если животное сохраняет устойчивую позу, стоя с опорой на все конечности, на опорное основание устанавливают тредбан для последующей локомоторной тренировки животного. Во время тестирования и локомоторного тренинга контролируют функциональное состояние животного. 4. Исходное положение «стоя на опорном основании с опорой на все конечности» В этом положении ограничения подвижности головы ослабляют, что увеличивает возможности контакта экспериментатора с животным, включая возможность кормления из рук. У животного, стоящего на опорном основании, тестируют двигательные реакции на тактильные раздражения кожи туловища и конечностей и выполнение постуральных и ориентировочных ответов в виде движения глаз, поворота головы и туловища в сторону предъявляемого сен-сорного сигнала. Затем проводят тренинг с целью восстановления врожденных пищедобывательных движений, выполняемых передними конечностями при извлечении животным из узкого тубуса пищи (например, кусочки мяса), подаваемой экспериментатором. Последующий локомоторный тренинг осуществляют с помощью тредбана, выполненного с возможностью изменения скорости, направления движения и угла наклона рабочей ленты тредбана. Тредбан при этом установлен на опорное основание. Инициирование животных к самостоятельному передвижению проводят без использования тредбана, отодвигая подвижные несущие каретки с закрепленным сборным стержнем-фиксатором головы назад от источника вознаграждения. В четвертом положении также возможно проведение тренинга двигательной координации мышц туловища и передних конечностей путем последовательного осуществления инструментальной реакции выжима передней конечностью рычага манипулятора, сменяемой извлечением этой конечностью подаваемого в тубусе вознаграждения. Кроме того, устройство позволяет исследовать тонические и фазические двигательные реакции испытуемого, на последовательное предъявление дискриминируемых пусковых и тормозных сенсорных сигналов и изменение порядка и скорости их чередования. Это достигается за счет того, что компьютер пульта управления экспериментатора снабжен аппаратно-программными средствами, определяющими порядок предъявления сигнальных стимулов, их длительность и временные интервалы между ними, а опорные платформы оснащены тензодатчиками, регистрирующими давление опорных и оперантных конечностей. При тестировании и локомоторном тренинге контролируют дискомфорт и наличие болевых ощущений у животного при выполнении указанных двигательных реакций. Тестирование и локомоторный тренинг животного на всех стадиях реабилитации проводится при сохранении мягкой иммобилизации головы. Изменение исходного положения (позы) животного обеспечивается путем установки/снятия съемных опорного основания и лотка устройства для последовательного размещения животного в вышеуказанных положениях «лежа», «сидя», «стоя». Мышечную нагрузку при осуществлении координированных движений увеличивают постепенно. По параметрам регистрируемых ответов оценивают сохранность исследуемых позных рефлексов, процесс восстановления координированных двигательных реакций и способность животных к передвижению. По этим показателям определяют оперативные тактики и физиотерапевтические процедуры, необходимые для дальнейшей коррекции двигательных функций животного. После окончания сессии диагностики и локо-моторного тренинга выключают электрические приборы, снимают фиксирующие элементы, ограничивающие подвижность головы, а животное размещают в контейнере, выполненном из мягкой ткани для проведения физиотерапевтической процедуры мануального массажа туловища и конечностей животного. Преимущества предлагаемого способа реабилитации децеребрированного животного и устройства для его использования состоят в том, что создаются оптимальные условия для восстановления генетически врожденных позных рефлексов и координированных движений головы, туловища и конечностей у животных с травматическими повреждениями различных отделов спинного и головного мозга. 1. Устройство обеспечивает постоянный контроль за осуществлением различных форм двигательной активности животного в ходе эксперимента. 2. Устройство обеспечивает возможность регулировать и калибровать чувствительность регистрации двигательной активности животного путем исходного растягивания в продольном направлении центральной части сборного стержня-фиксатора, выполненного в виде эластичной трубки, заполненной токопроводящим материалом, изменяющим при механических нагрузках регистрируемое электрическое сопротивление. 3. Устройство позволяет осуществлять мониторинг и автоматическую регистрацию координированных движений головы и глаз животного при выполнении тестируемых сенсомоторных реакций путем включения в состав устройства гибкого стержня-фиксатора головы в сочетании с пупилометром для регистрации глазодвигательных реакций. 4. Устройство позволяет осуществлять изменение нагрузки на шейные мышцы при повороте головы путем исходной регуляции гибкости рабочей части головодержателя. 5. Устройство позволяет проводить сенсомоторное тестирование и локомоторный тренинг животного при положении лежа на лотке, концевые части которого содержат вырезы, например, овальной формы, для выведения передних и задних конечностей животного наружу. 6. Устройство позволяет во время локомоторного тренинга количественно нагружать передние и задние конечности подопытного животного путем передвижения опорного основания вверх за счет вращения опорных гаек по резьбовой поверхности опорных стоек устройства. 7. Устройство позволяет поддерживать равновесие децеребрированных животных в естественном для восстановления двигательной функции положении, осуществляемое с помощью мягкой регулируемой системы иммобилизации головы животного - сборным стержнем-фиксатором, не вызывая стрессорной реакции на ограничение их подвижности. 8. Устройство позволяет инициировать животных на самостоятельное передвижение к отдаленному от него источнику вознаграждения без использования тредбана за счет того, что несущие каретки с закрепленным сборным стержнем-фиксатором головы, выполнены с возможностью перемещения по направляющим устройства. 9. Устройство дает возможность осуществлять тестирование и двигательный тренинг животного при иммобилизации головы в положении сидя за счет того, что лоток выполнен съемным, а животное сидит на опорном основании с возможностью орудийной деятельности, осуществляемой передними конечностями. 10. Устройство дает возможность контролировать дискомфорт и наличие болевых ощущений у животного при тестировании и проведении локомоторного тренинга. Это преимущество обеспечивается за счет регистрации вегетативных ответов - зрачковых реакций животного на применяемые раздражители. 11. Устройство позволяет мотивировать активность животных путем подачи вознаграждения за выполнение тестируемых условно-рефлекторных двигательных реакций. 12. Устройство позволяет при осуществлении животными двигательных реакций, выполняемых передними конечностями, регулировать нагрузку с помощью манипулятора, выполненного в виде рычага с грузом-противовесом. 13. Устройство позволяет регистрировать величину мышечных усилий животного при выполнении двигательных условно рефлекторных ответов за счет того, что рабочая площадка рычага оснащена тензодатчиком, включенным в электрическую схему устройства. 14. Устройство дает возможность регистрировать наличие попыток, латентный период, продолжительность, характер и динамику двигательных реакций, осуществляемых животным при выжимах рычага манипулятора, закрепленного на оси электрического потенциометра. 15. Устройство позволяет проводить тренинг для восстановления врожденных пищедобывательных движений, выполняемых передними конечностями, путем извлечения пищи из тубуса, предъявляемой экспериментатором в оформленном виде (например, кусочки мяса). 16. Устройство позволяет проводить тренинг двигательной координации мышц туловища и передних конечностей путем последовательного осуществления инструментальной реакции выжима передней конечностью рычага манипулятора, сменяемой извлечением этой конечностью подаваемого в тубусе вознаграждения. 17. Устройство позволяет исследовать тонические и фазические двигательные реакции испытуемого, на последовательное предъявление дискриминируемых пусковых и тормозных сенсорных сигналов и изменение порядка и скорости их чередования. Данное преимущество достигается за счет того, что компьютер пульта управления экспериментатора снабжен аппаратно-программными средствами, определяющими порядок предъявления сигнальных стимулов, их длительность и временные интервалы между ними, а опорные платформы оснащены тензодатчиками, регистрирующими давление опорных и оперантных конечностей. 18. Устройство, наряду с физиотерапевтическими процедурами, позволяет осуществлять лечебные сеансы путем мишень-на-правленной нейрохимической и электрической стимуляции су-праспинальных проводящих путей мозга, проводимой в условиях жесткого ограничения подвижности головы, которая в предлагаемом устройстве обеспечивается конструктивными возможностями центрального стержня-фиксатора, допускающего жесткое сочленение его составных несущих элементов. Заключение. Предложен способ диагностики и реабилитации децеребрированных животных, который может быть использован при проведении послеоперационных физиотерапевтических процедур и локомоторного тренинга у животных в клинических условиях. Способ направлен на восстановление врожденной двигательной координации, нарушенной у децеребрированных животных, при постоянном мониторинге их функционального состояния. Использованные технические решения позволяют повысить точность диагностики нарушений двигательной функции и сопутствующих сенсомоторных расстройств у животных с травматическми повреждениями, локализованными в различных отделах спинного мозга, Предлагаемый способ и устройство для его осуществления позволяют создать оптимальные условия для проведения двигательного тренинга и физиотерапевтических и процедур, направленных на реабилитацию децеребрированных животных и восстановлении врожденной двигательной координации травмированных животных при постоянном мониторинге их функционального состояния. Исследования проведены в лаборатории физиологии высшей нервной деятельности Института физиологии им. И.П. Павлова РАН. Работа поддержана государственной программой ГП 47 «Научно-технологическое развитие Российской Федерации» 2018-2023 гг. Инновационные технические решения, выявленные при разработке предложенного метода реабилитации децеребрированных животных, зарегистрированы в ФИПС РФ. Все международные, национальные и/или институциональные принципы ухода и использования животных были соблюдены. Все процедуры, выполненные при тестировании на животных, соответствуют этическим стандартам институционального и/или Национального комитета по исследовательской этике и Хельсинкской декларации 1964 года и ее последующим изменениям. Автор заявляет об отсутствии какого-либо конфликта интересов при проведении исследований и подготовке статьи к публикации. Список литературы: 1. Альбертин С. В. Головодержатель. Патент РФ № 2255701 от 10.07.2005. 2. Альбертин С. В. Устройство для хирургической иммобилизации животных с травматическими повреждениями спинного мозга // Ветеринария Кубани. 2017. № 5. 3. Альбертин С. В. Устройство для хирургической иммобилиации животных с травматическими повреждениями спинного мозга // Ветеринария Кубани. 2018. № 5. С. 17-22. 4. Способ исследования поддержания равновесия у децеребрированных животных / Мусиенко П. Е., Килимник В. А., Мошонкина Т. Р., Герасименко Ю. П. // Патент РФ № 2393761. 2009. 5. Albertin S. Effects of Injury of Cortico- and Rubro-Spinal Pathways on Operant Food-Procuring Reflexes // Neurophysiology. 2014. Vol. 46 (4). Pp. 352-360. 6. Barthelemy D., Leblond H., Rossignol S. Characteristics and mechanisms of locomotion induced by intra-spinal microstimulation and dorsal root stimulation in spinal cats // J. Neurophysiol. 2007. 97. Pp. 1986-2000. 7. Bunge M., Pearse D. Transplantation strategies to promote repair of the injured spinal cord // J. Rehabil. Res. Dev. 40 (Suppl 1). 2003. Pp. 55-62. 8. Canu M., Falempin M. Effect of hindlimb unloading on locomotor strategy during treadmill locomotion in the rat // Eur J Appl Physiol. 1996. 74 (4). Pp. 297-304. 9. Canu M., Garnier C. 3D analysis of fore- and hindlimb motion during overground and ladder walking: Comparison of control and unloaded rats // Exp. Neurology. 2009. No. 218 (1). Pp. 98-108. 10. Clinical Neurofunctional Rehabilitation of a Cat with Spinal Cord Injuiry after Hemilaminectomy and Stem Cell Transplantation / E. Penha, P. Aguiar, S. Barrouin-Melo et al. // Int. J. of Stem Cells. 2012. No. 5 (2). P. 140-150. 11. Configuration of electrical spinal cord stimulation through real-time processing of the kinematics / M. Capogrosso, F. Wagner, J. Gandar et. al. // Nature Protocol. 2018. No. 13. Pp. 2031-2061. 12. Cortico-reticulo-spinal circuit reorganization enables functional recovery after severe spinal cord contusion / L. Asboth, L. Friedli, J. Beauparlant et al. // Nat. Neurosci. 2018. No. 21. Pp. 576-588. 13. Cote M., Murray M., Lemay V. Rehabilitation strategies after spinal cord injury; the mechanisms of success and failure // J. Neurotrauma. 2017. No. 34. Pp. 1841-1857. 14. DeLeon R., See P., Chow C. Different effects of low vs high amounts of weight supported treadmill training in spinally transected cats // J. of Neurotrauma. 2011. No. 28. Pp. 1021-1033. 15. Effect of epidural stimulation of the lumbosacral spinal cord on voluntary movement, standing, and assisted stepping after motor complete paraplegia: a case study / S. Harkema, Y. Gerasimenko, J. Hodes et al. // Lancet. 2011. No. 377. Pp. 1938-1947. 16. Effects of task-specific locomotor and strength training in adults who were ambulatory after stroke / K. Sullivan, A. Drownd, T. Klassen et al. // Phys. Ther. 2007. No. 87. Pp. 1580-1602. 17. Engagement of the Rat Hindlimb Motor Cortex across Natural Locomotor Behaviors / J. DiGiovanna, N. Dominici, L. Friedli et al. // The Journal of Neuroscience. 2016. No. 36 (40). Pp. 10440-10455. 18. Intermittent noxious stimulation following spinal cord contusion injury impairs locomotor recovery and reduces spinal brain derived neurotrophic factor tropo-myosin-receptor kinase signaling in adult rats / S. Garraway, J. Turtle, J. Huie et al. // Neuroscience. 2011. No. 199. Pp. 86-102. 19. Robotic device for studying hind limbs stepping in rodents after spinal cord injury / J. Nessler, W. Timoszuk, M. Merlo et al. // 2005: 497-506. 20. Sakai A., Nakamura T. Changes in trabecular bone turnover and bone marrow cell development in tail-suspended mice // J Musculoskel. Neuron Interact. 2001. No. 1 (4). Pp. 387-392. 21. Thomas S., Gorassini M. Increases in corticospinal tract function by treadmill training after incomplete spinal cord injury // J. Neurophysiol. 2005. No. 94. Pp. 2844-2855. 22. Treadmill Training for Common Marmoset to Strengthen Corticospinal Connections After Thoracic Contusion Spinal Cord Injury / T. Kondo, R. Saito, K. Sato et al. // Frontiers Cell. Neurosci. 2022. No. 16. P. 858562. 23. What is Being Trained? How Divergent Forms of Plasticity Compete to Shape Locomotor Recovery after Spinal cord injury / J. Huie, K. Morioka, J. Hefeli et al. // J. of Neurotrauma. 2017. No. 34. Pp. 1831-1840. Резюме. Автором предложен инновационный способ восстановления генетически врожденных позных рефлексов и координированных движений головы, туловища и конечностей у животных с травматическими повреждениями различных отделов спинного и головного мозга. Реабилитацию осуществляют поэтапно, путем выполнения мотивированных целенаправленных двигательных реакций, последовательно изменяя исходное положение (позу) животного. Это стало возможным благодаря тому, что в устройство для осуществления указанного способа введены: съемный опорный лоток с вырезами и съемное опорное основание, выполненное с возможностью вертикального перемещения, гибкий стержень фиксации головы, пупилометр для регистрации глазодвигательных и зрачковых рефлексов, манипулятор в виде рычага с регулируемым грузом-противовесом, а также оснащено диспенсором вознаграждения, подаваемого в виде жидкой пищи и тубусом, предназначенным для восстановления у животного врожденных пищедобывательных движений, выполняемых передними конечностями при извлечении из тубуса порций пищи, подаваемой экспериментатором. Предложенные процедуры тестирования и двигательного тренинга создают оптимальные условия для реабилитации утраченных у децеребрированных животных сенсомоторных функций, при этом атравматическая иммобилизация животного обеспечивает возможность проведения лечебных сеансов, направленных на восстановление проводимости нервных путей головного и спинного мозга и улучшения трофических свойств нервной системы путем стереотаксической, мишень-на-правленной нейрохимической и электрической стимуляции сенсомоторной коры и супра-спинальных проводящих путей мозга, проводимая в условиях жесткого ограничения подвижности головы. В предложенном нами устройстве это условие обеспечивается конструктивными возможностями сборного стержня-фиксатора подвеса головы животного, допускающего, наряду с мягкой фиксацией головы животного, жесткое сочленение его составных несущих элементов. Ключевые слова: травмы позвоночника, иммобилизация животного, минимизация стресса, оперативное лечение и реабилитация, локомоторный тренинг, тестирование сенсомоторных реакций, мониторинг функционального состояния, восстановление генетически врожденной двигательной координации. Сведения об авторе: Альбертин Сергей Викторович, старший научный сотрудник Института физиологии им. И. П. Павлова РАН; 199034, г. Санкт-Петербург, наб. Макарова, 6; тел.: 8-906-2755103; e-mail: salber1@rambler.ru - ответственный за переписку с редакцией.
|


| 2011 © Ветеринария Кубани | Разработка сайта - Интернет-Имидж | |
|---|---|---|